Minden információra szükség van
Komoly kihívást jelent a mérnökök és közlekedési szakemberek számára, hogy az önvezető, valamint vezetéstámogató rendszerek működését összehangolják a közlekedés többi résztvevőjével. Elsősorban nem a járművekkel közlekedőkre gondolunk, hiszen számukra adott egy szabályrendszer, de a kerékpárosoknak és a gyalogosoknak ezt nem feltétlenül kell ismernie. Ráadásul a szakembereknek folyamatosan növekvő forgalommal kell számolniuk a városokban, emellett pedig az energiahatékonysági szempontokat is figyelembe kell venniük, hogy csökkenthető legyen a tüzelőanyag-felhasználás és a gyártók teljesíteni tudják a klímaváltozás elleni előírásokat is.
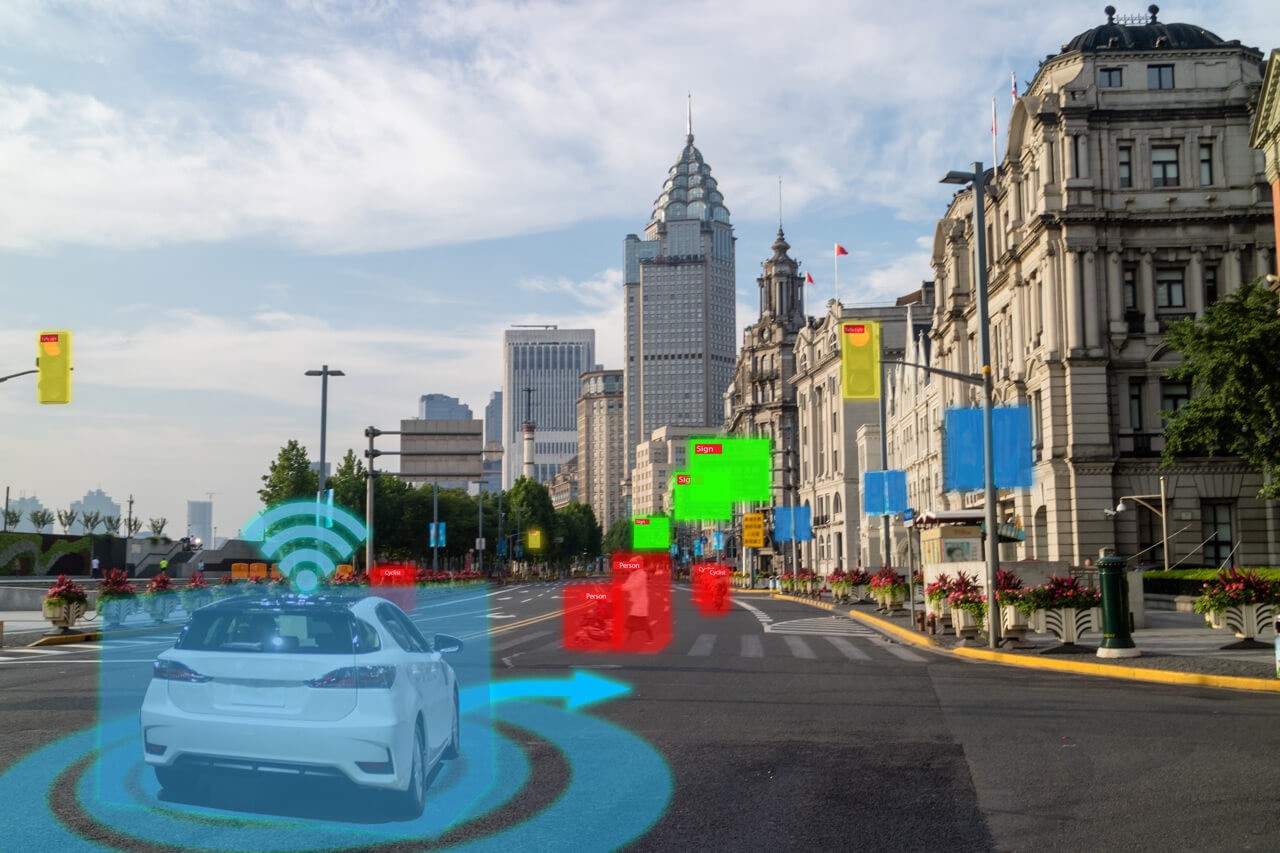
A LUKAS kutatási projektben a Bosch, az InMach, az IT-Designers, a Mercedes-Benz, a Nokia, az Ulmi Egyetem és a Duisburg-Esseni Egyetem éppen azt kutatja, hogyan lehetne javítani a forgalom hatékonyságát és biztonságát a komplex városi forgalomban. A szakemberek ezért a rendelkezésre álló összes információ felhasználásával próbálják megoldani, hogy gyorsabban, gördülékenyebben, biztonságosabban lehessen közlekedni. Ehhez összegyűjtik többek között a közlekedési csomópontokban elhelyezett érzékelők, térfigyelő kamerák és közlekedési lámpák által gyűjtött adatokat, a csatlakoztatott járművek, valamint a gyalogosok vagy kerékpárosok által használt mobileszközöktől – például okostelefonoktól – származó információkat.
Nincs többé vakfolt
Ez a koncepció anonim adatokat biztosít a forgalom résztvevőitől és az álló objektumoktól, beleértve az olyan paramétereket, mint a pillanatnyi helyzet, sebesség vagy a mozgásuk iránya. Az előre feldolgozott szenzorinformációkat egy szerverre továbbítják egy a csomópont közelében lévő 5G hálózat segítségével, ez ugyanis minimális késleltetési idővel biztosítja az adatátvitelt.
A peremszervereken található fúziós algoritmus képes átfogó modellt készíteni a helyi környezetről, és ennek alapján tervezni manővereket a kapcsolódó forgalom résztvevői számára. A koncepció lényege, hogy a szerver környezeti modelljéből származó objektuminformációkat visszacsatolják az úthasználókhoz. Ezáltal pedig a rendszer olyan területekre vonatkozó adatokat is képes szolgáltatni, amelyeket a forgalom egyes résztvevői maguktól nem tudnának észlelni, feldolgozni. A szerver mesterséges intelligenciát (MI) használ többek között optimalizált, együttműködő manőverek kiszámításához, majd utasításokat küld a csatlakoztatott résztvevőknek. Képes például figyelmeztetni a jobbra kanyarodó autóst a vele párhuzamosan haladó kerékpárosra.
Tesztelés közúti forgalomban
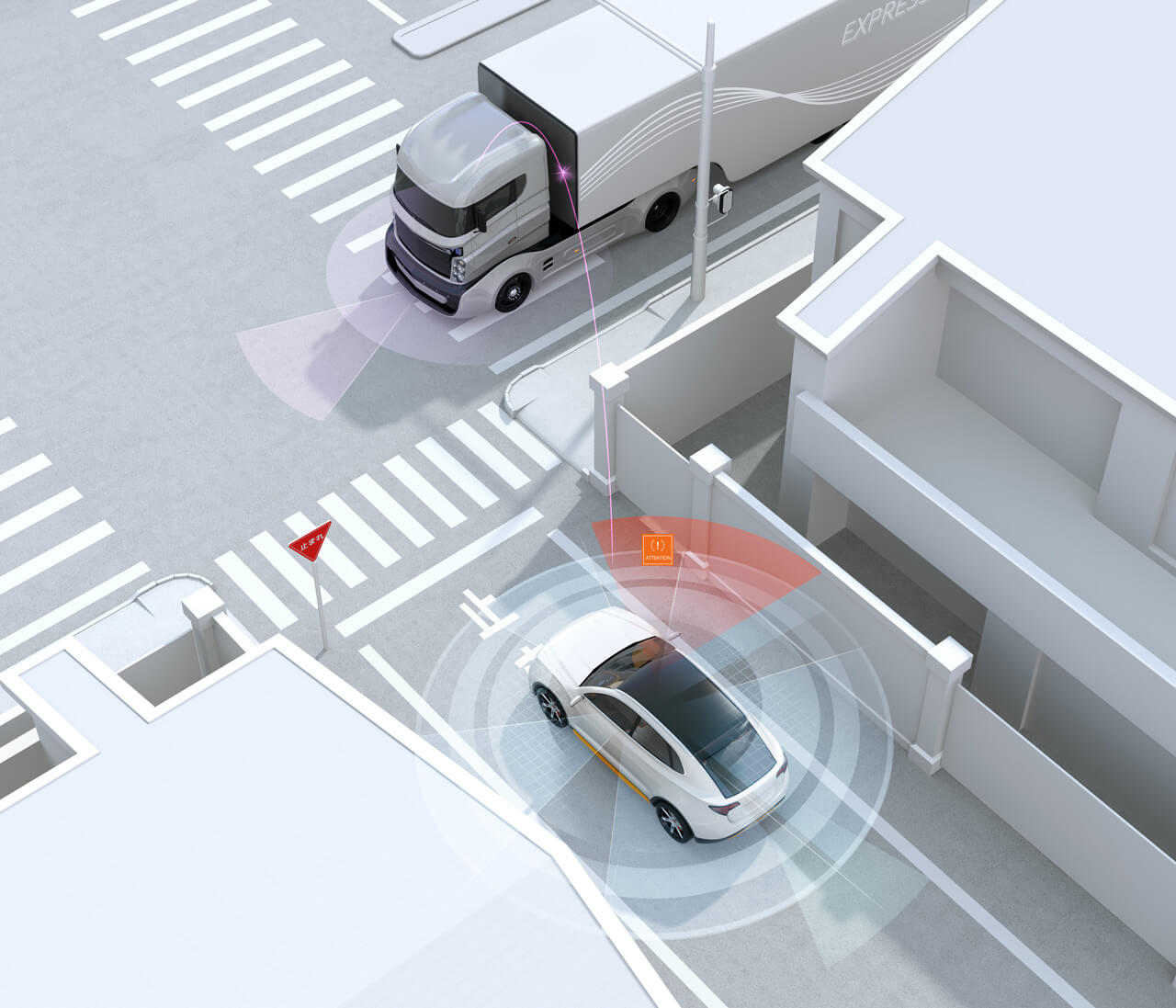
A fejlesztéshez szükséges teszteket a németországi Ulm-Lehr külvárosában, egy közlekedési csomópontban végezték, ahol egy kanyarodó főútvonal és egy mellékutca találkozik. Azért választották a mérnökök ezt a helyszínt, mert az ott található épületek és az éles kanyar miatt a főútvonalon közlekedők előtt takarásban van az út egy része, ami különösen érdekessé teszi a csomópontot. Itt valós forgalmi helyzetekben lehet megfigyelni a fejlesztések hatékonyságát, működőképességét.

Speciális helyszínt kerestek a fejlesztésben résztvevők, mert így tudták leginkább felmérni a rendszer kompetenciáit
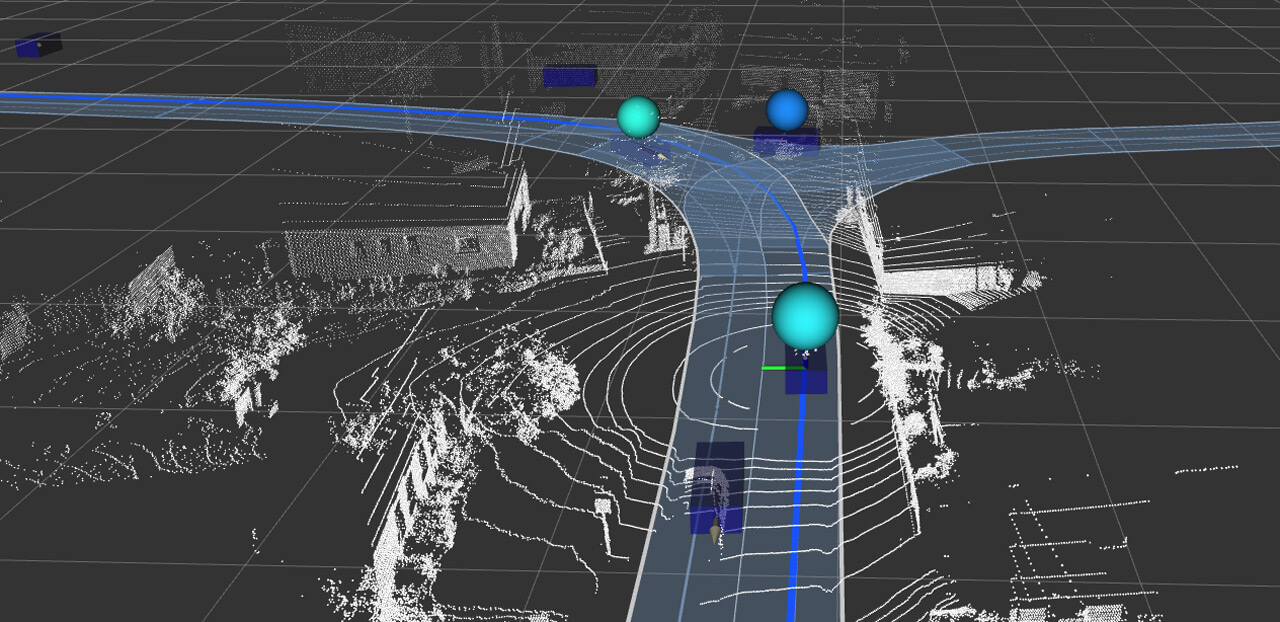
A csomópont környékén található lámpaoszlopokat video-, lidar- és radarérzékelőkkel szerelték fel, segítségükkel figyelik meg a forgalomban résztvevőket. Az információkat, például a globális környezeti modellt, a kooperatív manővertervezés több kiértékelt változatát, a gyalogosok és kerékpárosok figyelmeztető modulját egy Nokia 5G hálózaton keresztül küldik el a peremszerverre, természetesen úgy, hogy a személyek és a járművek adatai nem azonosíthatók.
Különleges járműveket és drónokat is bevetettek
A vegyes forgalom kooperatív felhasználási eseteinek tanulmányozására a Bosch, a Mercedes-Benz és az Ulmi Egyetem összekapcsolt, részben automatizált személygépkocsikat, az InMach az utcaseprő járművek hálózatba kapcsolt prototípusát biztosítja a tesztelésekhez. Az IT-Designers GmbH és a Nokia speciális okostelefon-alkalmazásai pedig lehetővé teszik a gyalogosok és kerékpárosok összekapcsolását a szerverrel. Az IT-Designers emellett egy videodrón segítségével gyűjt adatokat, hogy segítse a közlekedési forgatókönyvek szimulációját, míg a Duisburg-Essen Egyetem forgalomáramlás-szimulációkkal támogatja a projektet.

Még a köztisztaságért felelős járműből is építettek egy prototípust a program kedvéért
Eddig minden jól ment
Minden tesztelt eset igazolta a LUKAS megközelítés előnyeit a közlekedés hatékonyságának és biztonságának növelése kapcsán. Az MI-alapú algoritmusok szimulációs eredményei alapján a kutatók a forgalom jelentős növekedésére számítanak. Ezért különösen fontos eredmény, hogy a Mercedes-Benz tanulmánya szerint a hagyományos vezetéshez képest a LUKAS forgatókönyvei jelentősen csökkentik a tüzelőanyag-fogyasztást és a kereszteződésen áthaladáshoz szükséges időt.
Mindezt úgy sikerült elérni, hogy a szemből érkező forgalmat késleltetik. Így védik az álló járművek mellett, az úton áthaladó veszélyeztetett közlekedési résztvevőket, például gyalogosokat, kerékpárosokat az épületek által takart, nehezen belátható területeken.
Hasznos tapasztalatok
Az új technológiának és az együttműködésen alapuló forgatókönyv-tervezésnek köszönhetően a közlekedők korán felismerik, hogy melyik vezetési stratégia teszi lehetővé számukra a biztonságos és hatékony viselkedést.
Nemcsak biztonságosabbá, gyorsabbá, hatékonyabbá is teheti az új rendszer a városi közlekedést
A LUKAS projekt eredményei lehetővé tették a konzorcium partnerei számára, hogy tapasztalatokat szerezzenek az összekapcsolt, kooperatív vezetésről, és ezt beépítsék új termékek fejlesztésébe. Vagyis a LUKAS által kifejlesztett megközelítés biztonságosabbá és hatékonyabbá teheti az automatizált vezetést a városi vegyes forgalomban a közlekedés minden résztvevője számára.


