Egymással nemcsak kommunikáló, de együtt is működő, a másik fél igényeivel is kalkuláló önvezető rendszerekkel lehet megteremteni a biztonságos és torlódásoktól mentes közlekedést. Ezen dolgoznak most a Bosch mérnökei.
Ahhoz, hogy gyorsan és biztonságosan lehessen autózni, nemcsak az önvezető rendszerek esetében szükséges a járművek közötti együttműködés, hanem az emberek által vezetett járműveknél is. Természetesen ez már régóta így is működik a gyakorlatban, hiszen ahhoz, hogy biztonságos és folyamatos legyen a forgalom, néha a sajátunk mellett a többi résztvevő érdekeit is figyelembe kell vennünk. Gondoljunk csak bele, ha sávváltáskor nem engedne át senki, vagy egy főútvonalra sűrű forgalomban nem lehetne felhajtani, mert egyetlen autós sem lenne előzékeny. Ez a sok bosszúság mellett rengeteg időveszteséget is jelentene. Az persze folyamatosan, minden közlekedési szituációban változik, hogy mások előzékenyek velünk, vagy mi lehetünk azok a többi autóssal. Ez lényegében egy többügynökös rendszernek tekinthető, ahol a forgalom résztvevői közösen próbálnak elérni egy közös célt: a biztonságos és gyors haladást.
Önzetlen önvezetők
Az önvezető autók esetében is hasonló elvek alapján kell megtervezni a rendszert, nem „gondolhat” egy teljesen automatizált jármű sem kizárólag „magára” vagyis utasaira, más közlekedési szereplők igényeit is figyelembe kell vennie ahhoz, hogy biztonságosan, torlódások nélkül, a lehető legköltséghatékonyabban lehessen utazni. Az automatizált járműveknél ezért Sense-Plan-Act (Értelem-Terv-Cselekvés) koncepcióról beszélünk, aminek a megvalósításához fejlett kommunikációs technológiák szükségesek. A V2X (vehicle-to-eveything communication) rendszer így az automatizált járművek fontos elemévé válik. Ennek használatával megelőzhető annak a kockázata, hogy az önvezető járművek „önzővé” váljanak, és csak saját költségeik optimalizálásával törődjenek, illetve túl óvatos vezetéssel akadályozzák a folyamatos haladást.
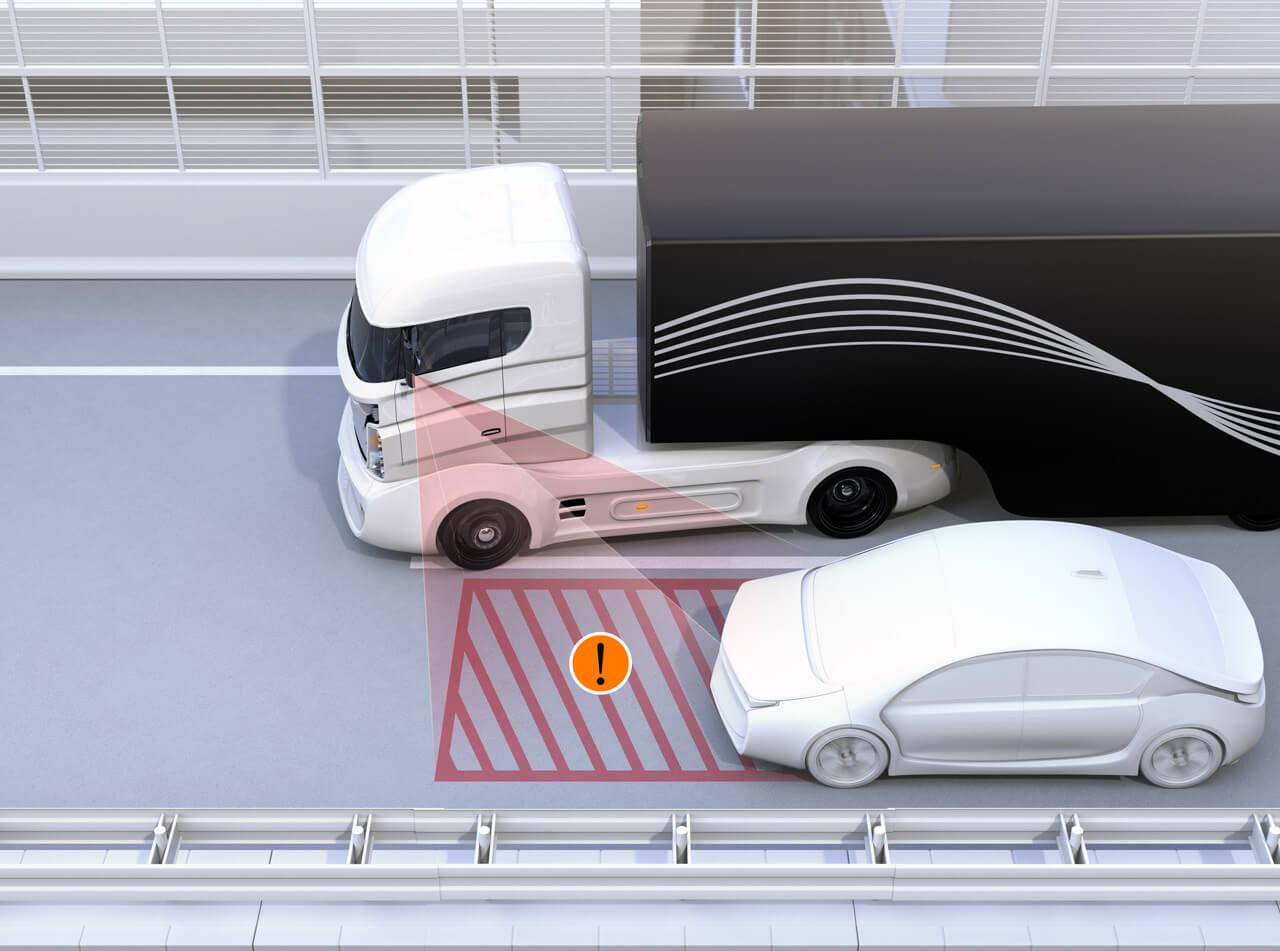
Fontos, hogy az önvezető járművek sem válhatnak önzővé
Ahhoz, hogy önzetlen és így mindenki számára hatékony legyen a közlekedés, három alapvető technológiára van szükség: kollektív észlelésre, a manőverek koordinációjára és a megbízható kommunikációs technológiákra.
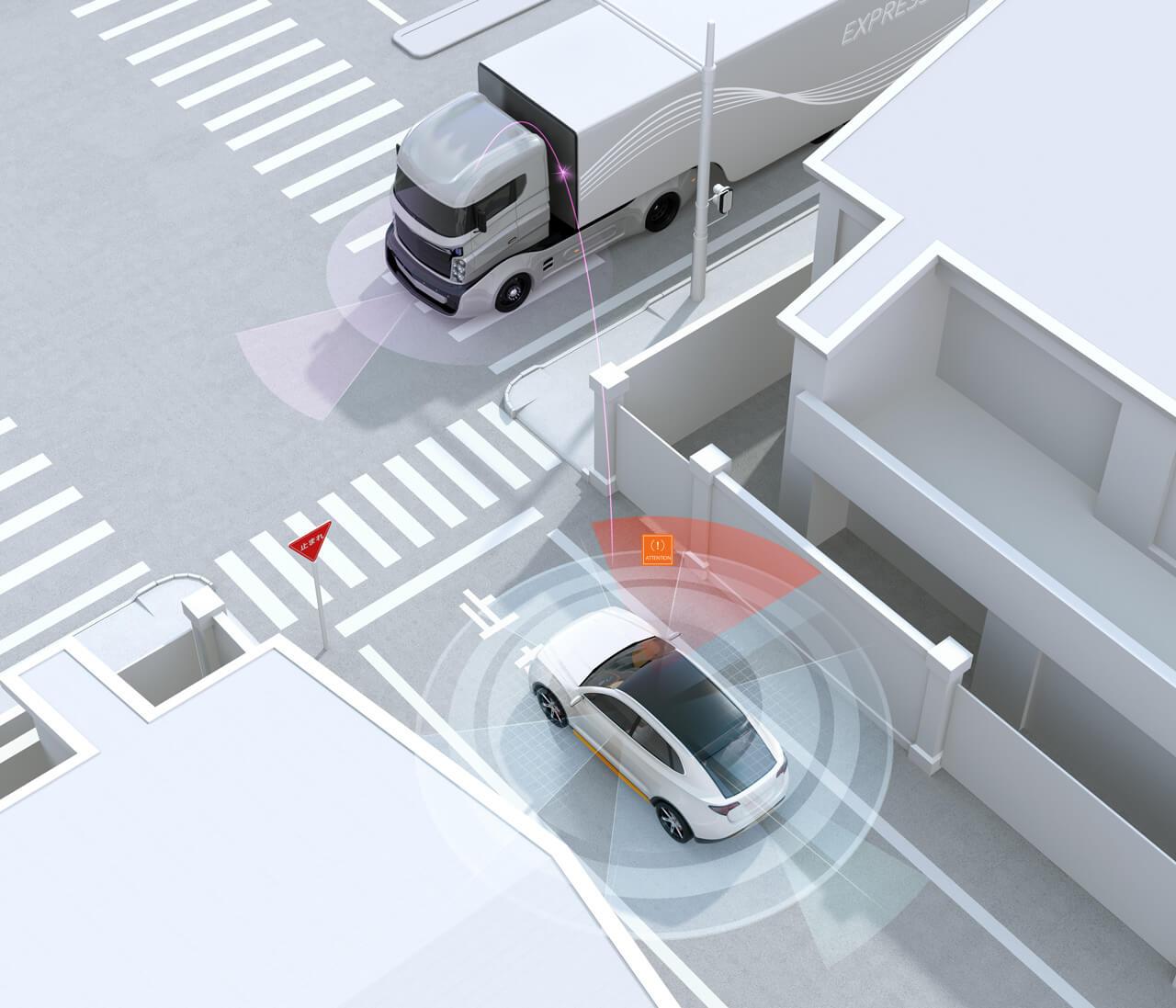
Közösen érzékelnek
A kollektív észlelés során több információ jut el a járművekhez, illetve azok fedélzeti számítógépéhez, mint amennyit a jármű saját, beépített szenzorai által össze tud gyűjteni. Egy adott jármű a közlekedés többi szereplője, így a közelben haladó járművek vagy az utcai kamerák által felismert tárgyakról, például járművekről vagy akár az úttesten átszaladó gyalogosokról szóló információkat is megkapja. Ez a Collective Perception Service (CPS) elnevezésű fejlesztés már most is működik.
A járművek kommunikációja mellett fontos lehet az infrastruktúrát is bekapcsolni a rendszerbe
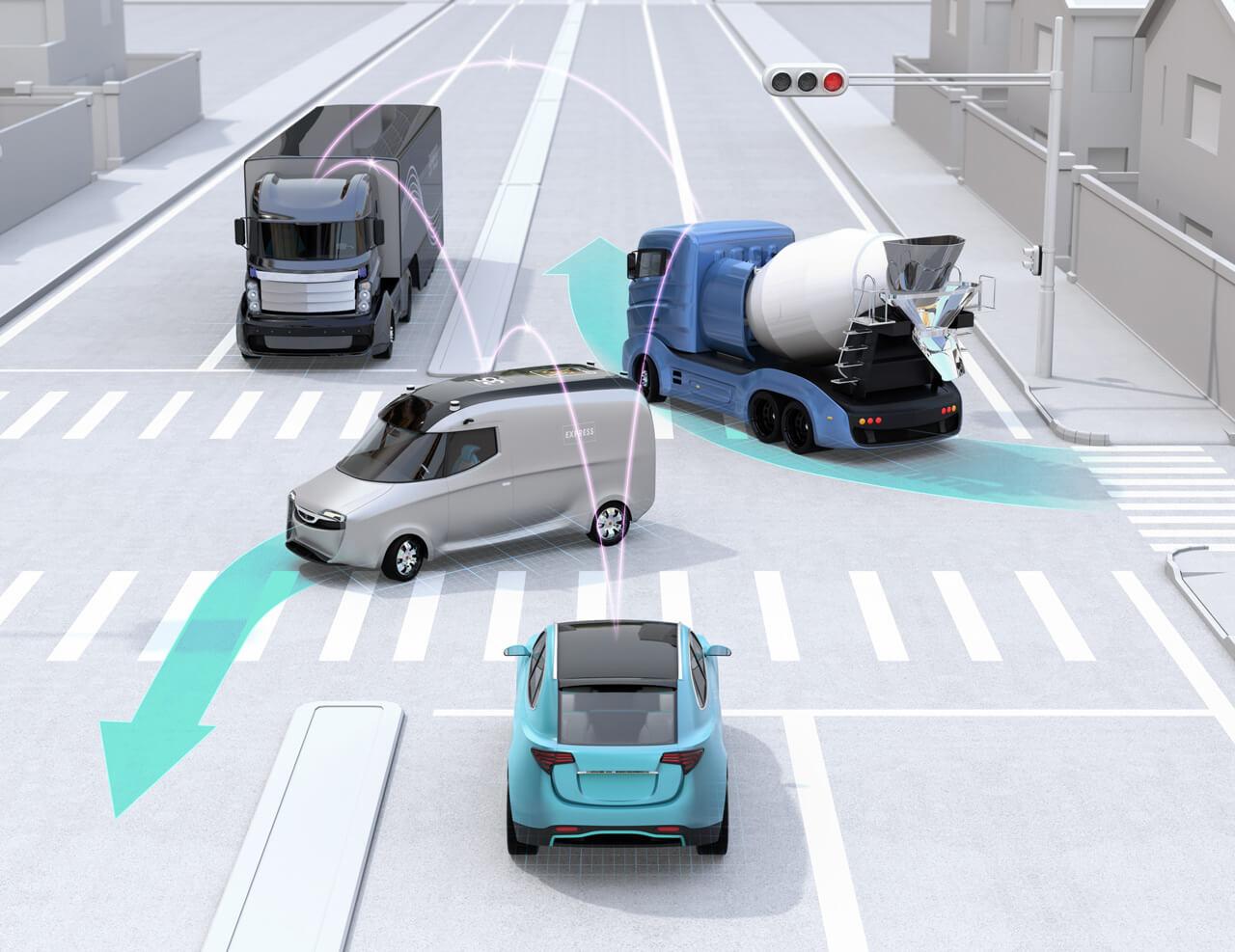
Egyeztessünk, ki merre menjen!
A manőverkoordináció rugalmas koncepciót igényel, amely minden közlekedési helyzetben használható megoldáshoz vezet. A V2X üzenetek alapján különböző típusú pályák (referencia, alternatív és kérés) cseréje történik, amelyek mindegyikéhez költségérték társul.
Egy jármű vezetési szándéka kódolva van az aktuális tervét leíró referenciapályán, ami még a forgalom többi szereplőjének igényeit nem tartalmazza. Az együttműködési ajánlatokat pedig alternatív pályákként kommunikálják. Válaszul a másik jármű egy kérési pályát ad, amely figyelembe veszi a különböző ajánlatokat. Ez a Maneuver Coordination Service (MCS) elnevezésű mechanizmus, ami jól meghatározott, de fejlesztése egyelőre még a kezdeti szakaszban van.
Az önvezető járművek kommunikációjának köszönhetően ki sem alakul majd a közlekedési torlódás a jövőben
Kommunikáljon mindenki mindenkivel!
A járművek, vagy akár a közlekedési csomópontokban elhelyezett kamerák, érzékelők közötti kommunikációs technológiák szintén nélkülözhetetlenek ahhoz, hogy megbízhatóan, folyamatosan és gyorsan működjön az információcsere. A CPS és MCS üzenetdefiníciója a felső OSI-rétegek része. Mellettük az alsóbb szintű OSI-rétegek is számos kihívással néznek szembe, például azzal, hogy elkerüljék az átviteli csatorna kapacitásának akár átmeneti túlterhelését.
A világ különböző pontjain más technológiát használnak, az IEEE 802.11p szabványon alapuló ITS-G5 és a 3GPP 14. frissítésére épülő LTE-V2X bevezetési fázisban van. A 3GPP 16. frissítésen alapuló 5G-V2X pedig új funkciókat hoz el meg a manőverkoordináció szempontjából.
A jövőben a közlekedés minden szereplőjének kommunikálnia kell majd egymással
A fejlődés persze nem áll meg, ezért az integrált kommunikáció és érzékelés lesz a további fejlesztések egyik fő pillére, csakhogy az már 6G, vagyis hatodik generációs alapokon. Ez utat nyithat a kollektív észlelés és az üzenetváltás egy rendszeren belüli ötvözésére. Ehhez persze még sok, összehangolt kutatás szükséges. A kooperatív vezetés ugyanis nemcsak a forgalom résztvevői közötti együttműködést jelenti, hanem a kutatóintézetek, egyetemek és az autóiparban érintett vállalatok közötti összefogást is, az átfogó fejlesztés érdekében.


