
Négy évvel ezelőtt 21 német autóipari szereplő és a német kormány egy közös projektben (VVM) egyesítette erőit. Az összefogás célja egy olyan biztonsági szabvány megalkotása volt, amely a világon elsőként képes az önvezető járművek ellenőrzésére városi környezetben.
A városi közlekedés kihívásai
Gyalogosok, kerékpárosok, motorosok, korlátozottan belátható kereszteződések, közlekedési lámpák és táblák, sűrű forgalom: az önvezető rendszereknek például ezekkel a kihívásokkal kell megbirkózni városi környezetben. Ahhoz, hogy a jövő önvezető járművei képesek legyenek kezelni a felsoroltak mellett minden más helyzetet – így a rendkívül ritka forgatókönyveket is – olyan áttekinthető struktúrákra és folyamatokra lesz szükségük, amelyek kivételes helyzetekben is lehetővé teszik a rendszer biztonságos működését, vagyis ellenőrizni is tudják a manővereket.
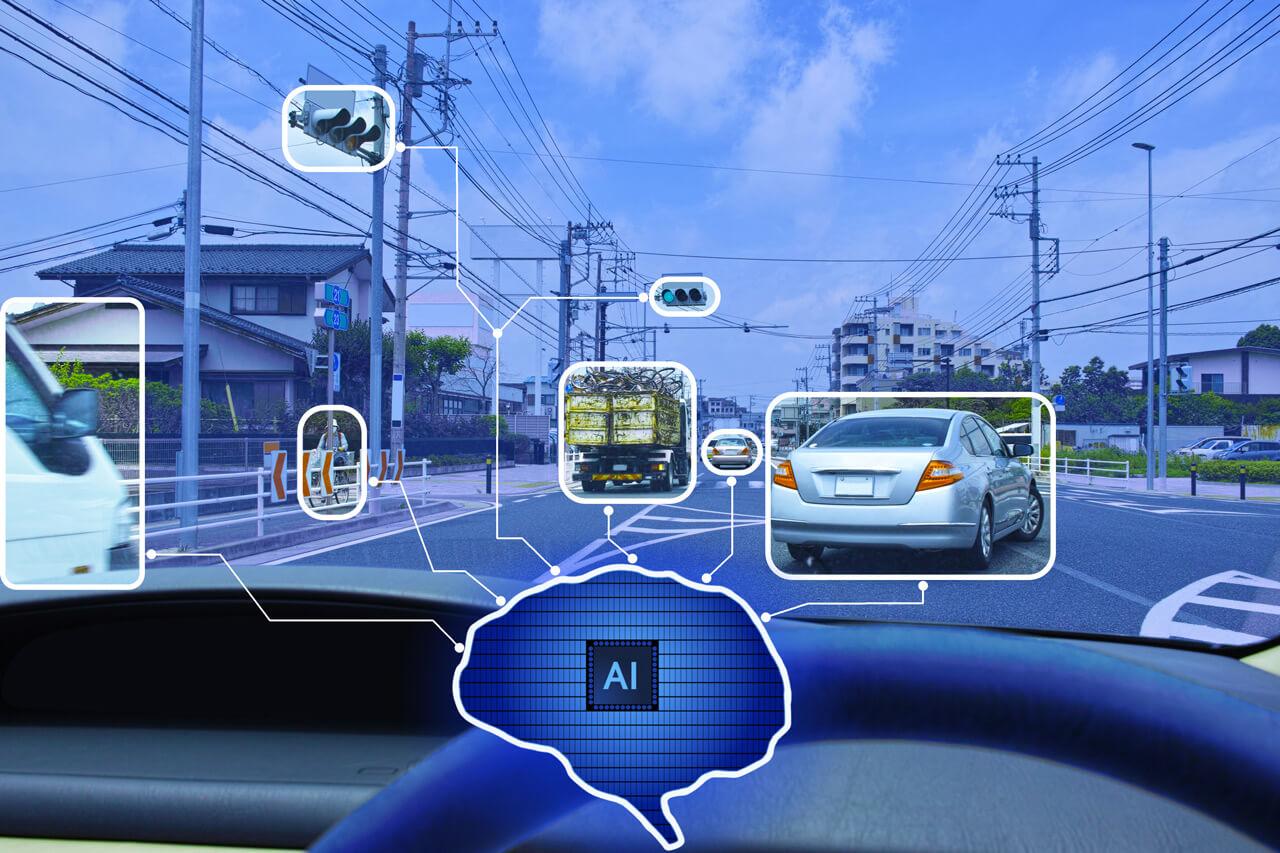
A városi forgalomban rengeteg változóra kell odafigyelni
A VVM kutatási projekt lényege annak ellenőrzése, hogy az önvezető járművek biztonságosan és megbízhatóan reagálnak-e minden helyzetben. Az előírások betartása mellett a német autóipari szereplők tehát éppen azon dolgoznak, hogy az önvezető rendszerek minél hamarabb és minél biztonságosabban legyenek képesek közlekedni az utakon. Mindennek az alapja a most kifejlesztett rendszer.
Ellenőrzött biztonság
Az önvezető rendszerek tervezése és fejlesztése során az első és legfontosabb szempont a biztonság. Az ilyen funkciókat azonban ellenőrizni is kell, mielőtt egy jármű engedélyt kap közúti használatra. Ennek érdekében a 21 projektpartner közösen kidolgozott egy modellt, amely eljárások, módszerek és eszközök sorozatát tartalmazza. Ez lehetővé teszi az önvezető rendszerek ellenőrzését, ha a fejlesztéseket iparági szinten alkalmazzák.

A konzorcium tagjainak listája
A széleskörű elterjedést jelentősen megkönnyíti, hogy a kifejlesztett megoldás minden autógyártó számára képes azonos struktúrákat biztosítani a városi területeken működő önvezető rendszerek ellenőrzéséhez és validálásához. A VVM olyan referenciarendszert hozott létre ezzel az iparág számára, amely kiiktatja a módszertani hiányosságokat, és biztosítja a német ipar úttörő szerepét az automatizált vezetés nemzetközi terén. Ez alapján ráadásul létrehozhatóak globális, iparági szabványok is, a projektben alkalmazott forgatókönyv-alapú biztonsági ellenőrzési megközelítésnek köszönhetően.
Ha már biztonságos, legyen hatékony is!
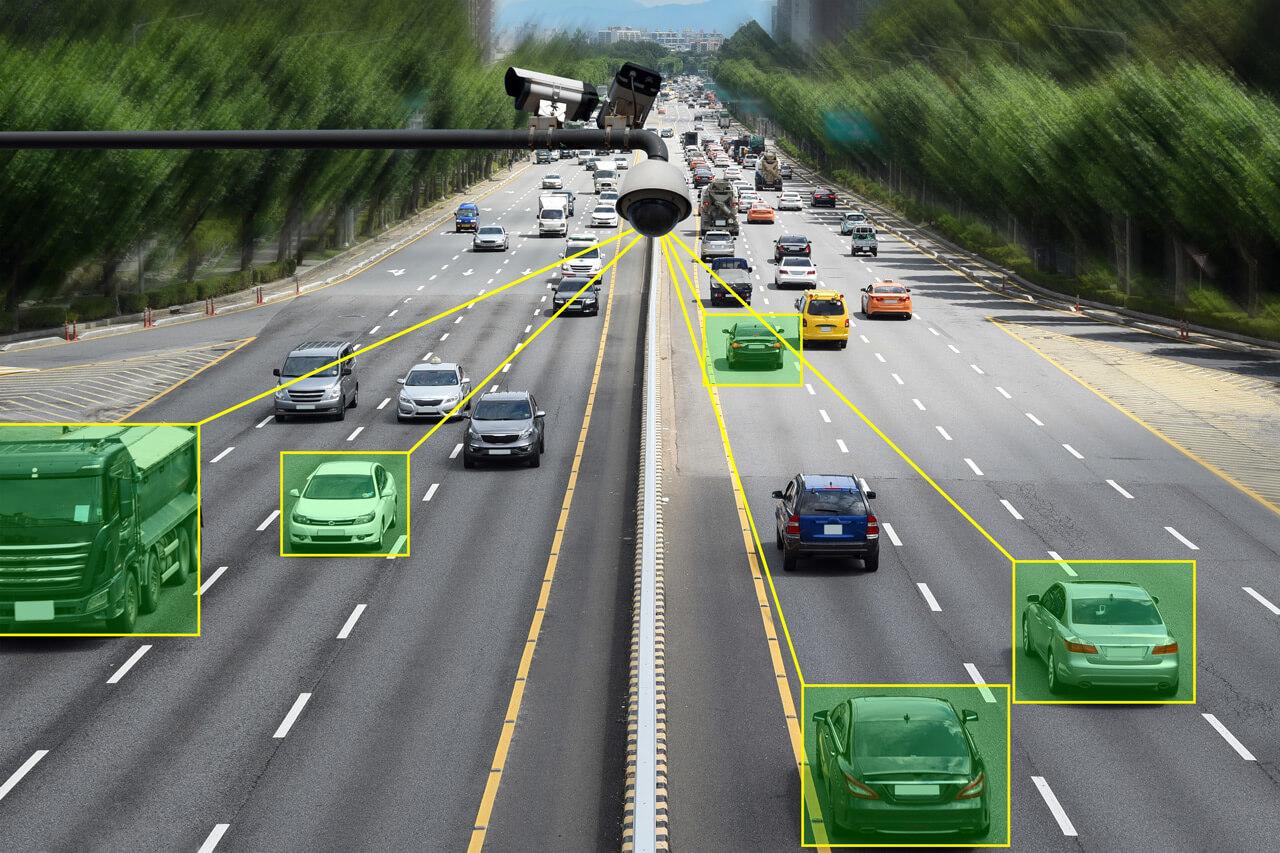
A projekt során azt is vizsgálták a szakemberek, hogy a telepített infrastruktúra miképp segítheti ki a rendszert
A VVM projekttel párhuzamosan több olyan fejlesztésen is dolgoznak a Bosch szakemberei, amelyek biztonságosabbá teszik az önvezető és fejlett vezetéstámogató rendszereket. Például a LUKAS projektben azt vizsgálják, hogyan lehetne javítani a közlekedés hatékonyságát és biztonságát a komplex városi forgalomban. A szakemberek ezért a rendelkezésre álló összes információ felhasználásával próbálják megoldani, hogy gyorsabban, gördülékenyebben, biztonságosabban lehessen közlekedni. Ehhez összegyűjtik többek között a csomópontokban elhelyezett érzékelők, térfigyelő kamerák és közlekedési lámpák által gyűjtött adatokat, a csatlakoztatott járművek, valamint a gyalogosok vagy kerékpárosok által használt mobileszközöktől – például okostelefonoktól – származó információkat.
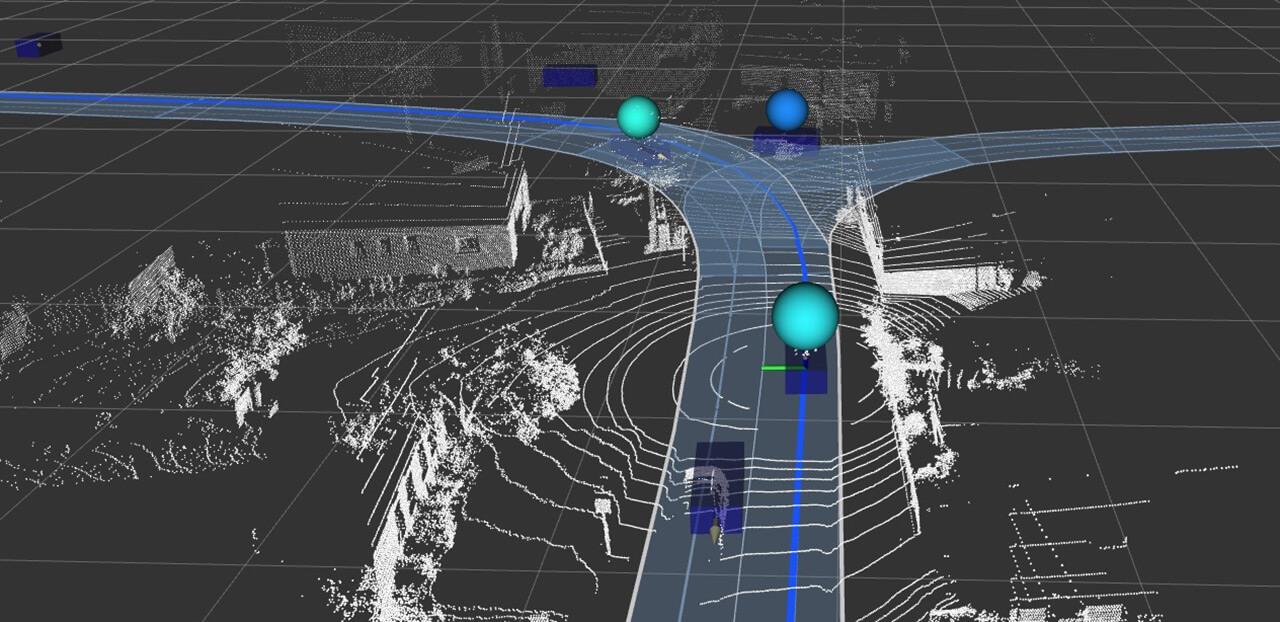
Továbbra is a városi környezet jelenti a legnagyobb kihívást az önvezetés kapcsán
Egy algoritmus segítségével a rendszer képes átfogó modellt készíteni a helyi környezetről, és ennek alapján tervezni manővereket a kapcsolódó forgalom résztvevői számára. A koncepció lényege, hogy a szerver környezeti modelljéből származó objektuminformációkat visszacsatolják az úthasználókhoz, így pedig olyan területekre vonatkozó adatokat is képes szolgáltatni a rendszer, amelyeket a forgalom egyes résztvevői maguktól nem tudnának észlelni.
Önzetlen önvezetők
Egy másik kutatásban pedig a kommunikációs csatornák fejlesztésére helyezték a hangsúlyt, amivel azt szeretnék elérni, hogy ne legyenek „önzőek” az önvezető járművek. Ez azért fontos, mert a biztonságos és gyors közlekedés során nem „gondolhat” egy teljesen automatizált jármű sem kizárólag „magára”, mások igényeit is figyelembe kell vennie. Az automatizált járműveknél ezért Sense-Plan-Act (Értelem-Terv-Cselekvés) koncepcióról beszélünk, aminek a megvalósításához fejlett kommunikációs technológiák szükségesek. A V2X (vehicle-to-eveything communication) rendszer így az automatizált járművek fontos elemévé válik.

Az önvezető autóknak empátiát is kell tanulniuk, mert emberek között kell közlekedniük


