25 éve jelent meg a Bosch első adaptív sebességszabályozó rendszere. Bernhard Lucas veterán mérnök segítségével idéztük fel a korábbi kihívásokat.
A vezetéstámogató rendszerek biztonságosabbá és kényelmesebbé teszik a közlekedést. Segítenek megelőzni a baleseteket, vagy éppen mérsékelni azok következményeit.
Huszonöt évvel ezelőtt a Bosch új mércét állított fel, amikor 2000-ben bemutatta a radartechnológiát használó adaptív sebességszabályozó rendszerét. Ennek köszönhetően a jármű felismerte a szenzorok előtt haladó gépkocsikat, meghatározta azok sebességét, és fékezéssel, valamint gyorsítással tartotta a kívánt követési távolságot. Ez jelentősen megkönnyítette a járművezető dolgát, különösen az autópályákon és gyorsforgalmi utakon.
Amikor 1995-ben a Bosch létrehozta radarfejlesztési részlegét, Bernhard Lucas az elsők között csatlakozott. A következő 24 évben kizárólag Bosch-radarokon dolgozott, kulcsszerepet játszott azok fejlesztésben.
Hogy került Bosch a radarok világába?
A polgári radar az 1970-es években jelent meg. Terjedését sokáig gátolta, hogy bár minél alacsonyabb volt a használt frekvencia, az antenna ezzel arányosan egyre nagyobb lett. Ez az út az autók számára nem volt járható. Az áttörést a Prometheus projekt hozta meg, amely során több különféle rendszer kialakításával és tesztelésével kísérletezett mérnök csapatunk. Többek között parkoló asszisztenseket, ultrahangos szenzorokat, és az adaptív sebességszabályozókat is fejlesztettünk.
A Prometheus projekt
Az autógyártók, autóipari beszállítók és tudományos intézmények által támogatott Prometheus projekt 1986-ban olyan, akkoriban még futurisztikus témákat ölet fel, mint az autonóm vezetés, az útvonal-iránytó rendszerek és a környezetükkel kommunikálni tudó járművek. Az együttműködés eredményeként készültek el az első valódi önvezető autók, amelyek egyszerre akár hat másik járművet is tudtak azonosítani, és alkalmazkodni tudtak a környezetükhöz.

A Prometheus projekt keretében több önvezető autó is épült
A projekt csúcsteljesítményeként 1995-ben egy automatizált Mercedes S-osztályú jármű 1758 kilométeres utat tett meg Münchenből Koppenhágába, és vissza. A teljes utat ugyan nem, de egyhuzamban 158 kilométert vezetett a jármű emberi beavatkozás nélkül.





Hogyan működik?
Érdekesség, hogy az adaptív sebességszabályzót eredetileg csak ütközésre figyelmeztető rendszernek szánták. Később lett belőle követési mód, vagyis a cél az volt, hogy az autó rögzítse az előtte haladó járművet, majd tartsa a hozzá mért távolságot, végül pedig kapcsoljon ki, ha a másik járművet már nem érzékeli.
„Akkor még nem gondoltunk arra, hogy lehetséges lesz a különböző sávok felismerése, vagy hogy a rendszer döntési kompetenciát kaphat például abban, hogy kérdéses szituációkban melyik autót követi. Ez utóbbi különösen kanyarokban érdekes kérdés. Akkoriban a radar csak „előre nézett”, nem voltak kamerák az autókban, nem gondoltuk, hogy a szögfelbontás lehetséges lesz” – emlékezett vissza Bernhard Lucas.
Távolságot és sebességet viszonylag egyszerűen lehet mérni, de az oldalirányú pozíciók meghatározása már sokkal nehezebb. Tulajdonképpen a szögbecslés az, ami algoritmusokkal határozható meg.
A Bosch mérnökei azt tervezték a kezdetekben, hogy a rendszert beszállítóktól érkező alkatrészekből építik fel. Azonban a partnerek nem tudták szállítani a kívánt minőséget és mennyiséget. Ekkorra a Bosch már fontolóra vette, hogy házon belül gyártsa a radarokat, amelyek végül Stuttgart mellett készültek el.
Tesztek valós körülmények között
A próbák során természetesen akadtak problémák. A mérnökök aggódtak a szomszédos sávokból érkező visszaverődések miatt. Ha az adaptív sebességszabályozót a bal sávban használták a csapat tagjai, és nem volt előttük senki, előfordulhatott, hogy a jobb oldalon haladó járművek is lassították az autót. Ez különösebben nem volt veszélyes — mivel a tempomat fékezése korlátozott — ugyanakkor a vezető számára nagyon zavaró volt.
A legfőbb nehézség a megfelelő szög meghatározása volt, főként az úgynevezett többszörös jelútválás miatt. Itt például a szalagkorlátokról visszaverődő jelekre kell gondolni. Azok ugyanis tükörként viselkedhetnek, és a rendszer veszélyt észlelve aktiválhatja az üzemi fékberendezést. Ami azonban még ennél is nagyobb meglepetésként érte a csapatot, hogy a betonoszlopok is visszaverték a jelet.
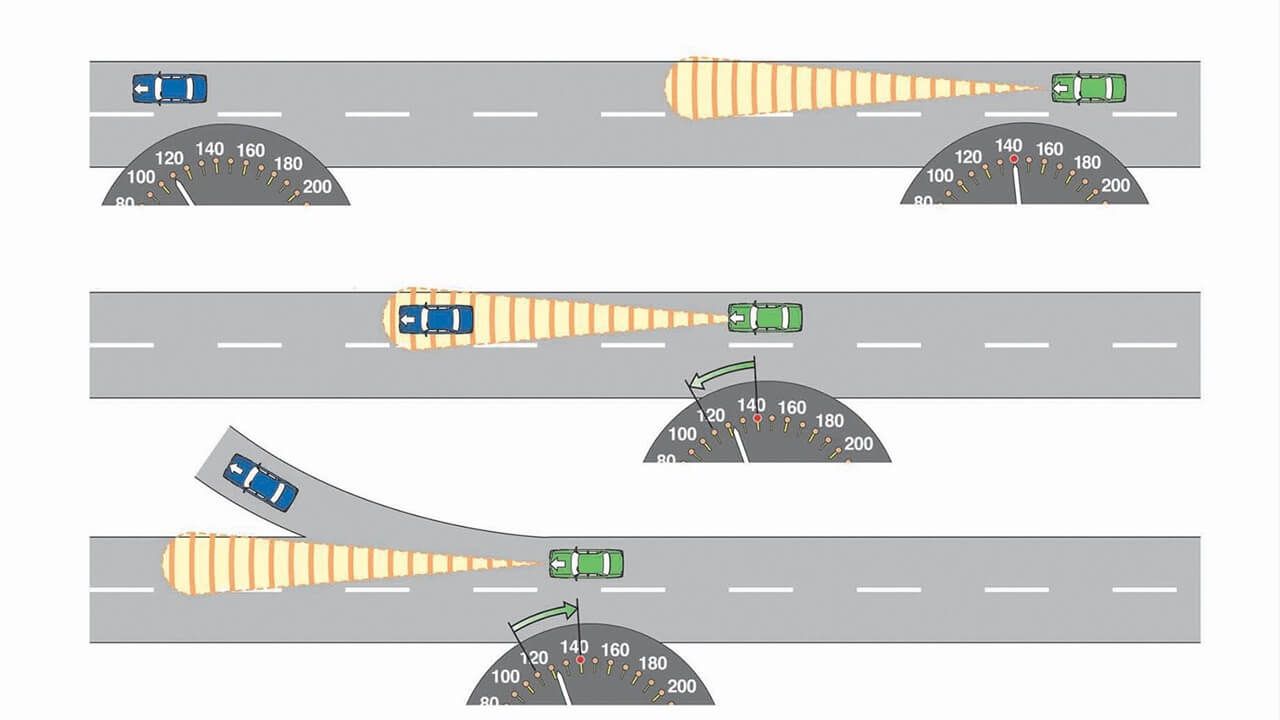
Az adaptív sebességszabályozó technológia működési elve
Más gondok is adódtak
„Egészen őrült és különleges esetekkel is találkoztunk a vészfékrendszerek fejlesztése során” – emlékszik vissza Lucas Bernhard. Szimulációval sok mindent próbára lehet tenni, de a tesztsofőrök így is több ezer kilométert tettek meg, és rengeteg értékes tapasztalatot gyűjtöttek. Például egyes mélygarázsok bejáratánál az út hirtelen emelkedik, vagy lejt így a belépés pillanatában csak a garázs mennyezete, vagy padlója látható. A radar pedig bizonyos fémtáblákat, vagy akár az út szélén eldobott üdítős dobozokat is képes járműként azonosítani, hiszen ezek kiválóan visszaverik a radarhullámokat.
Problémamegoldás: lépésről lépésre
Ezeket a problémákat egyesével kezelték: a mélygarázs bejáratához magassági becsléseket vezettek be a fejlesztőmérnökök. Bizonyos tárgyakat a radarjelek alapján is be lehet azonosítani. Egy kiemelkedő tárgynál van a tárgyról és a talajról visszavert hullám is, egy lapos tárgynál – például egy aknafedélnél – viszont csak a közvetlenül visszaverődő jel van. Ezt fel lehetett használni arra, hogy megkülönböztessük ezeket.

Gyártásban a harmadik generációs adaptív sebességszabályozó radarja
Gyártásra készen
Végül minden megoldódott, de a folyamat a megszépült emlékek alapján is küzdelmes volt. Az első generációnak magas volt a gyártási költsége, így a gyártott darabszámok alacsonyak voltak. A második generációnál jelentősen csökkentek a költségek, de még mindig csak néhány ügyfél használta. Egy olyan termék volt ez, amely alaposan megelőzte a korát.
És mi történt ezután? Jött a harmadik generáció. Sikerült áttérni a drága alkatrészekről — mint a gallium-arzenid — a többé-kevésbé hagyományosnak mondható szilícium lapkákra. A szakértelem és a rendszerismeret kombinációja volt a siker receptje. Az első egymillió radar legyártásához 13 évre volt szükség, a második millióhoz pedig csupán további 13 hónapra.
És hol járunk ma? Nemrég ünnepeltük a százmilliomodik példányt.


