Automatizálva, villamosítva, hálózatba kapcsolva – a Bosch mobilitási üzletágának ez a három stratégiai pillére, amelyek fejlesztésén meglepően régóta, több évtizede dolgoznak kollégáink. Annak ellenére, hogy rengeteg munkát fektettek a cég szakemberei a kutatásokba, vannak olyan megoldások, amelyeket még csak mostanában kezdetek el az autógyártók a szériafelszereltség részeként alkalmazni. Egy sor találmány ugyanis évtizedekkel megelőzte a korát és csak sokkal később érett meg a piac arra, hogy azok széles körben elérhetők legyenek.
Villanyautó-kísérletek
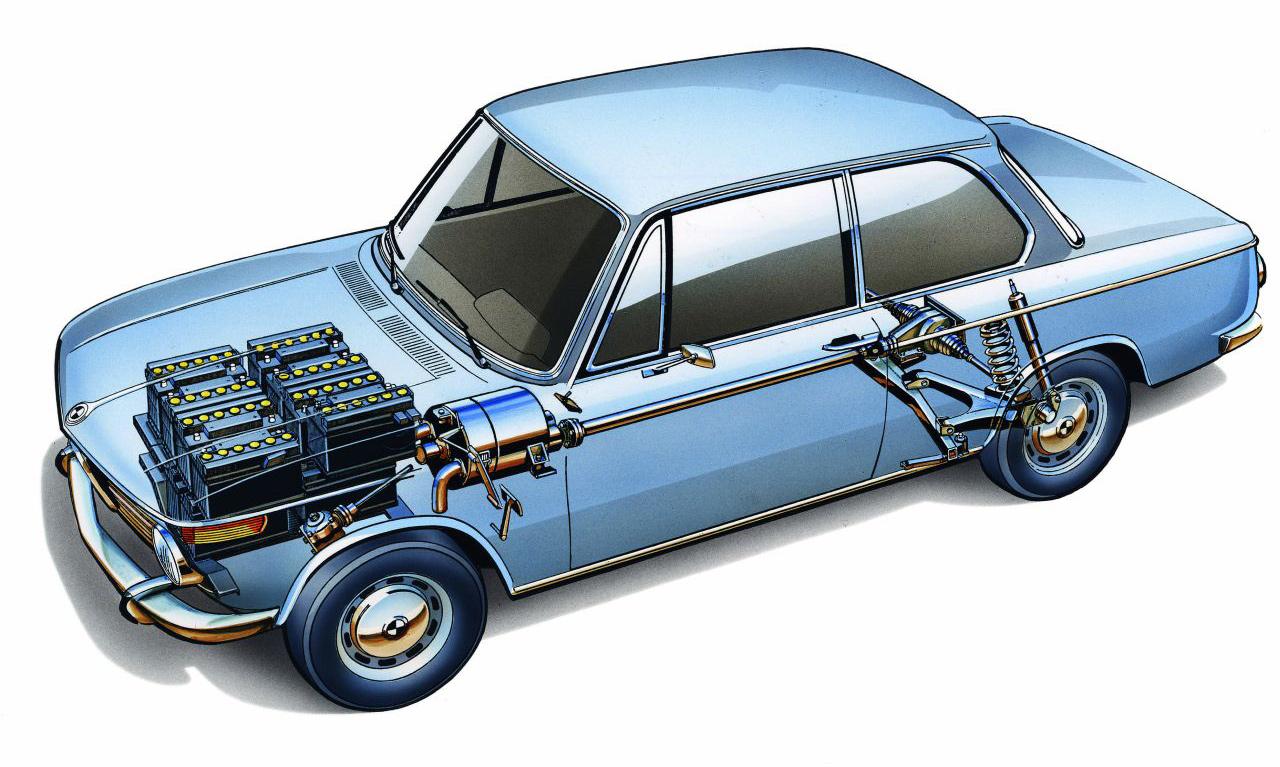
Első hallásra hihetetlennek tűnik, de a Bosch már 1967-ben elkezdett foglalkozni az elektromos hajtással! Mérnökeink annak ellenére indították el kutatásaikat, hogy abban az időben a benzinmotor egyeduralkodó volt (azon egyszerű oknál fogva, hogy az autógyártás hajnalán, az 1900-as években a benzin mai szemmel nézve még olcsó volt, az elektromos hajtáshoz képest pedig sokkal nagyobb volt a megtehető távolság is, ezért ezt a technológiát fejlesztették tovább a gyártók). A Bosch jövőbe látó szakemberei azonban ennek ellenére elkezdtek foglalkozni az elektromos hajtás fejlesztésével, hogy olcsó, tiszta energiával működhessenek egyszer az autók. Különálló kutatás foglalkozott a fékenergia-visszanyeréssel, a nagyobb kapacitású akkumulátorokkal és a villamos hajtás szabályozására szolgáló elektronikával.
Elektromos hajtás a hetvenes évektől

Fontos mérföldkő volt az 1971-es év, ekkor ugyanis a Bosch egy Opel GT sportkupét alakított át és épített bele elektromos hajtásláncot. A tesztjármű lenyűgöző bizonyítéka volt az alternatív hajtásban rejlő lehetőségeknek. A különleges jármű pilótája, Georg von Opel több akkori autós világrekordot is felállított, például 240 kilométer/órás sebességre volt képes felgyorsulni a különleges autó, egy kilométert pedig – álló helyzetből – 31,07 másodperc alatt tett meg. Ezt követően 1972-ben a Bosch egy újabb kísérleti projektbe fogott, és a müncheni olimpiára több BMW-t is elektromos hajtásúvá alakított. Ezeket a járműveket használták felvezető autóként bizonyos versenyszámokhoz, többek között a maratoni futóversenyen.
Ugyanebben az évben megkezdődött a elektromos autóbuszok tesztelése is. 1974-ben Mönchengladbachban már forgalomba állítottak egy ilyen buszt, Stuttgartban pedig egy dízel/elektromos hibridhajtású változatot használtak. Ezzel párhuzamosan a Bosch bemutatott 1973-ban egy Ford Escort benzin/elektromos hibrid személyautót is. Annak ellenére, hogy az 1973-as, első olajválság rávilágított arra, hogy az olajkészletek végesek, az elektromos hajtás akkor még nem érdekelte a világot. Bár a Bosch 1977-től 1982-ig kiemelten foglalkozott az elektromos hajtás fejlesztésével, akkor még az a járműgyártókat sem érdekelte, a cég egyetlen ilyen megrendelést sem kapott. Az ok prózai volt: az akkori akkumulátorokkal ugyanis legfeljebb 100 kilométeres hatótávot lehetett elérni (azt is hatalmas tömegnövekedéssel), ez pedig kevés volt. Az elektromos hajtás így továbbra is „árnyékban maradt” és lényegében csak a villás targoncáknál alkalmazták. Közel három évtizeddel később kapott csak új lendületet a hibrid és elektromos hajtás fejlesztése: a Bosch több évtizedes kutatási eredményei segítségével 2010-ben hibrid, majd 2013-ban elektromos hajtásrendszert fejlesztett ki.

Kommunikáció – az első lépés a hálózatba kapcsolt járművek felé
Az elektromos hajtás mellett az autók kommunikációs technológiájára is régóta összpontosít a Bosch. A cég által fejlesztett első autós telefont 1985-ben kezdték el gyártani, igaz, széles tömegek nem engedhették meg maguknak, mivel 6000 német márkába került (ami egy kisebb autó árával vetekedett akkoriban). Pedig ennél már jóval régebben, 1954 óta foglalkozik a Bosch mobilkommunikációval: a rendőrség és tűzoltóság számára már ekkor is készített rádiós berendezéseket.
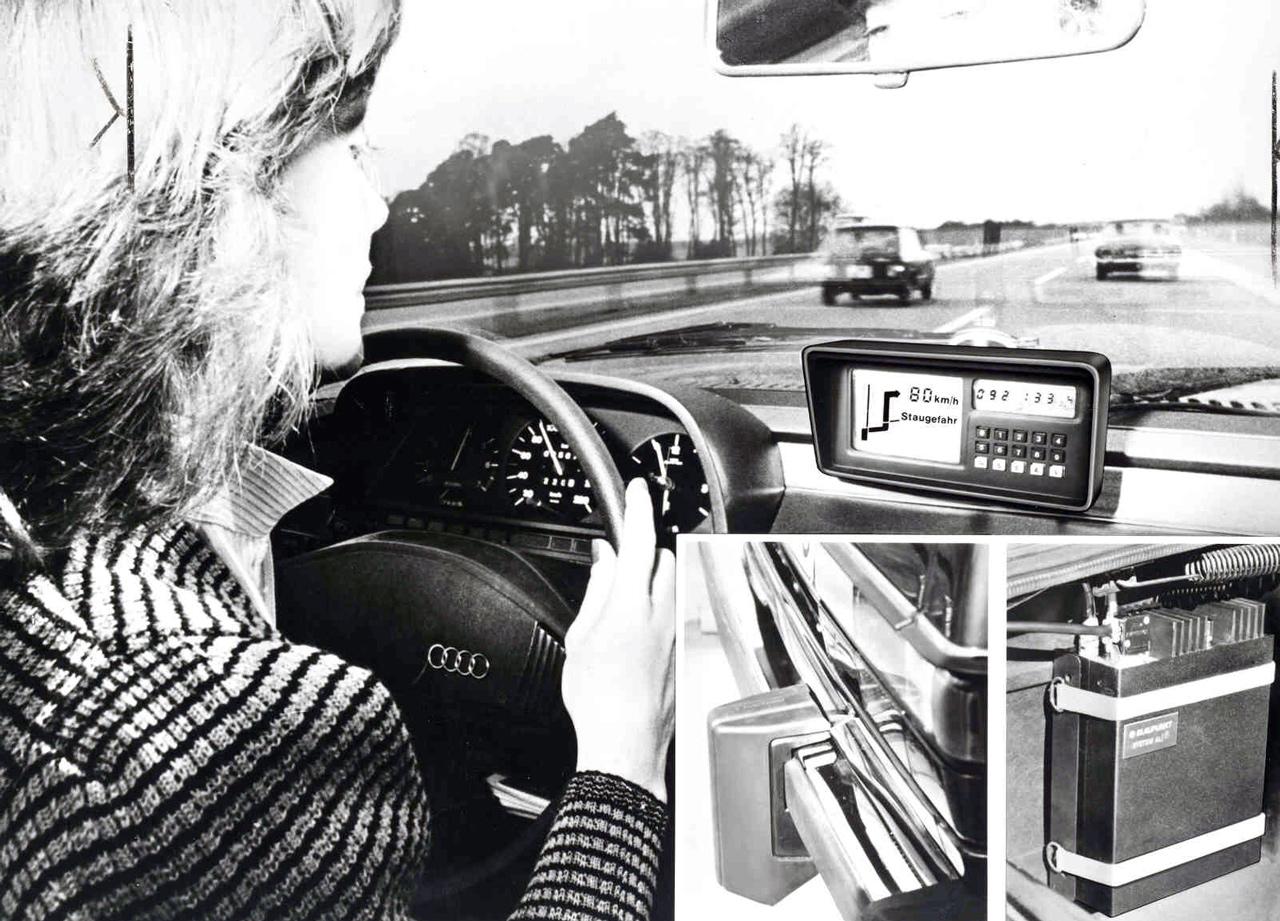
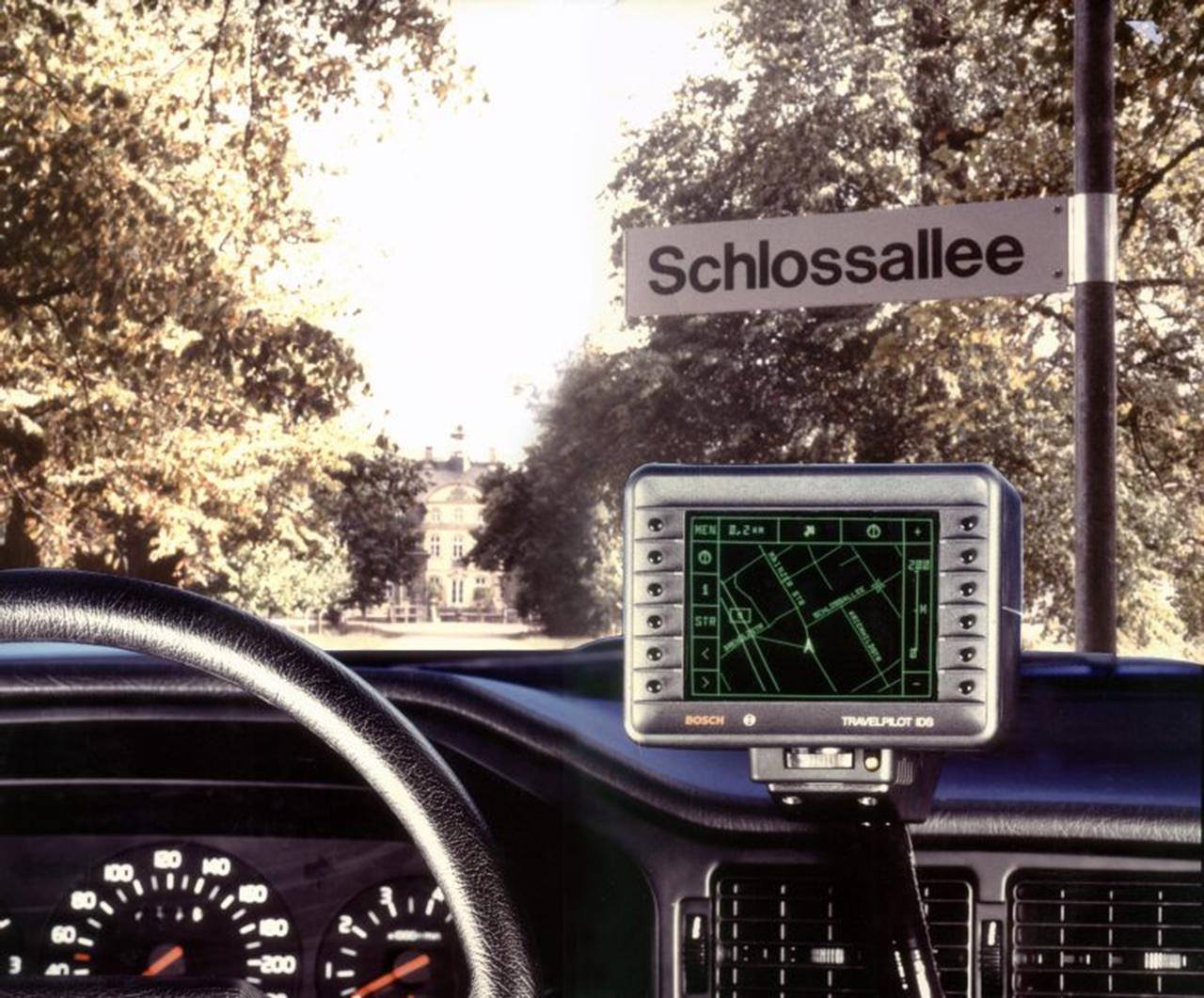
Nemcsak az autós telefonok, hanem a navigációs berendezések terén is hihetetlenül korán nyitott a Bosch. Az ALI névre keresztelt rendszer fejlesztése az 1970-es évek elején kezdődött, 1978-ban pedig már közúti forgalomban, autópályán is tesztelték. Már ekkor – egy központi számítógép segítségével – figyelték a pillanatnyi forgalmi helyzetet és ha valahol forgalmi torlódás alakult ki, meg tudták tervezni a leggyorsabb útvonalat az ALI-t használó autósoknak. Még ez előtt a Bosch akkori leányvállalataként működő Blaupunkt közlekedési hírdekódert fejlesztett ki, ennek segítségével a forgalmi jelentéseket lehetett nyomon követni és kikerülni a dugókat. Az autós navigáció fejlesztése töretlenül folytatódott, 1983-ban a Bosch bemutatta az EVA prototípusát, ami a mai navigációs rendszerek ősének is tekinthető. Persze „kicsit” máshogy nézett ki ez az eszköz, mint a mai modellek. Egy bőrönd méretű fedélzeti számítógép, digitális térkép és kerékszenzorok alkották és már képes volt megszólalni, hogy útvonalakat ajánljon. 1989-re ezt a prototípus a TravelPilot váltotta fel, amelynek az 1995-től gyártott második generációs változata képes volt a GPS-adatok segítségével a jármű pontos pozíciójának meghatározására.
Önvezető autók a tesztpályán
A Bosch már az 1970-es években kísérletezett a vezető nélküli buszokkal tesztpályákon. Ekkor azonban még a maitól gyökeresen eltérő megoldással próbálkoztak: az úttest felületére és a járművekbe is érzékelőket szereltek, hogy a „pályán tartsák” azokat. Persze ez a megoldás nem terjedt el, borzasztóan költséges lett volna minden úttestre érzékelőket fektetni. Néhány évet várni kellett arra, hogy lendületet kapjon az önvezető járművekkel kapcsolatos kutatás. A Bosch 1993-ban hajtotta végre első ilyen irányú tesztjeit a Prometheus európai kutatási projekt égisze alatt. Az útjelzésekre, a közlekedési táblákra és az összes többi fontos paraméterre alapozva a Bosch által átalakított furgon sok kilométert megtett autópályákon, körforgalmakon és városokon keresztül, minden probléma nélkül. Ez a fejlesztés is jelezte, mit hozhat a jövő, pedig ez még csak kutatási projekt maradt.
Újabb lépés az önvezető autók felé
Később aztán újabb fontos technológiai lépések következtek. A Bosch 2000-ben vezette be az Adaptive Cruise Control (ACC) rendszereket, amelyeknek „lekle” azok a radarok voltak, amik újabb mérföldkövet jelentettek az önvezető autók irányába. Ez a megoldás ugyanis a sofőr beavatkozása nélkül is képes volt lefékezni az autót, ha az előtte haladó jármű túl közel kerülne, vagy bármi egyéb forgalmi akadályba ütközne. Ezt követően pedig az előre beállított sebességre gyorsít vissza. Az ACC második generációja pedig, ha kellett, meg is állította és el is indította a járművet a közlekedési dugókban. 2008-ban mindemellett egy olyan parkolóasszisztenst is kifejlesztett a Bosch, amelynek segítségével már anélkül is leparkolhattunk, hogy kormányozni kellett volna az autót. Bizony, már ennek is tíz éve, és a fejlődés azóta sem állt meg.

Automatizálva, villamosítva, hálózatba kapcsolva
A feljebb említett kifejezések nem három különálló fejlesztési célt takarnak, egymást kiegészítve és erősítve kölcsönhatásba lépnek egymással. Ezzel biztonságos, alacsony károsanyag-kibocsátású, gazdaságos közlekedést biztosítanak. A különböző érzékelők és az internetes kapcsolat támogatják az okos és önvezető autókat: egy előttünk történt baleset esetén például önállóan képesek aktiválni a fékrendszert. Az elektromos hajtást pedig segítheti a navigáció, például akkor, ha az akkumulátor lemerülőben van. Eben az esetben a legközelebbi töltőállomásra irányít minket a rendszer. Minden ilyen alrendszer összefügg, így összekapcsolásukkal megalkothatjuk a biztonságos és okos, akár önvezető autókat.